F4 2020 CADathon – FRC Football Shooter Robot
Summary
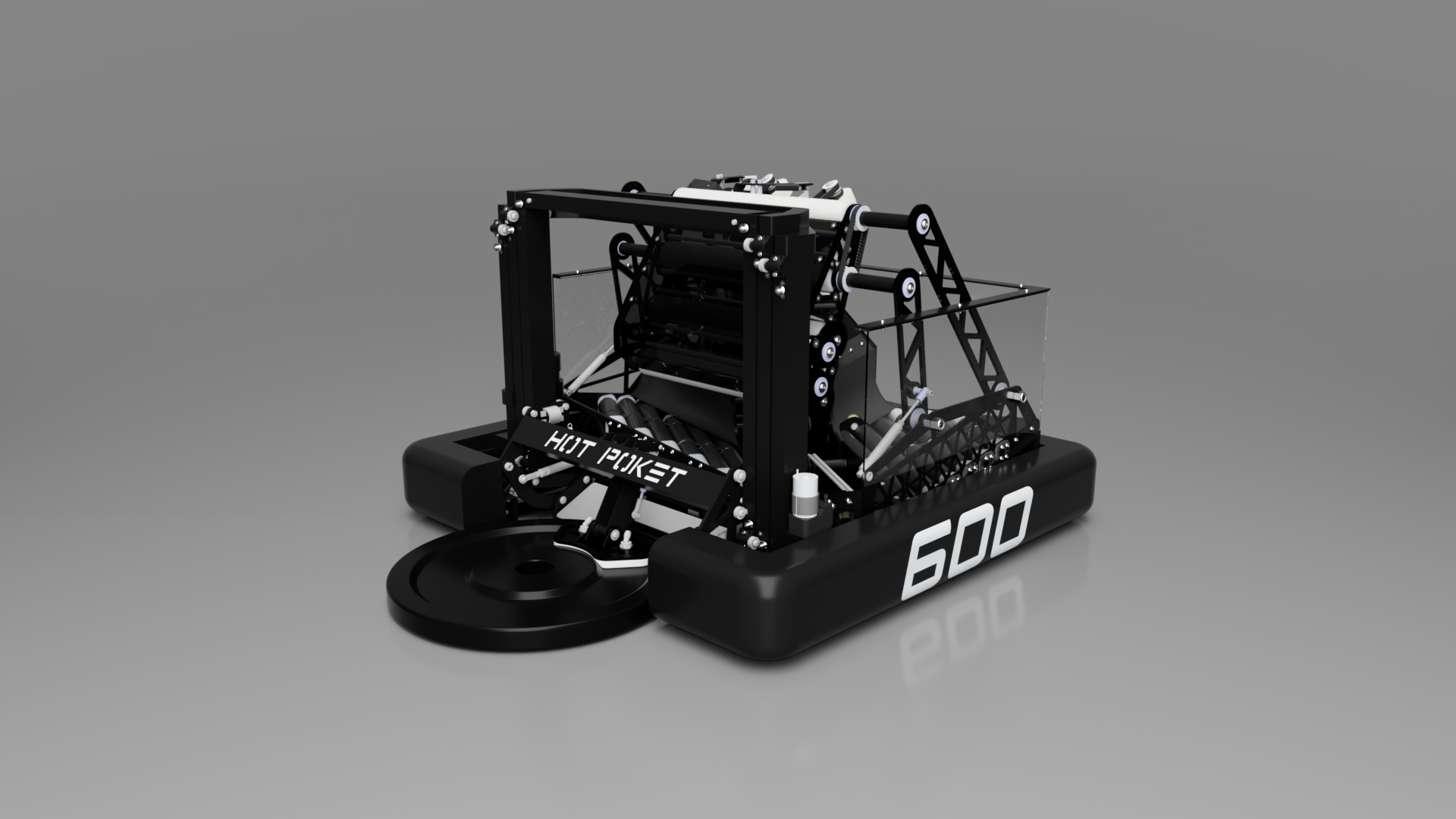
The goal of this project was to design a robot for the F4 CADathon, a biannual CAD design competition for FIRST Robotics Competition (FRC) students. My team consisted of 3 members from different FIRST Tech Challenge (FTC) teams located in Texas, Missouri, and Pennsylvania. Utilizing remote collaboration tools, we successfully designed a robot that placed 10th out of 164 competing teams. We had three days to design a robot capable of collecting and shooting footballs into elevated targets, as well as lifting and stacking weights.
My responsibility on the team was to design the turret system for football shooting and the lift system for weight stacking.

Cycloidal Gearbox/Epicycloid Turret
The main design goal of the turret was to create the lowest backlash system possible. This was to increase football shooting accuracy. This was achieved by a custom cycloidal gearbox and a turret and pinion setup with an epicycloid profile.
How it works
A NEO 550 brushless motor drives a custom designed 40:1 cycloidal gearbox. Due to space constraints within the robot, a low-profile gearbox needed to be created. COTS components were unable to fit in the space allocated for the turret gearbox, and a cycloidal gearbox was designed to reduce backlash and because of its ease of manufacturing.
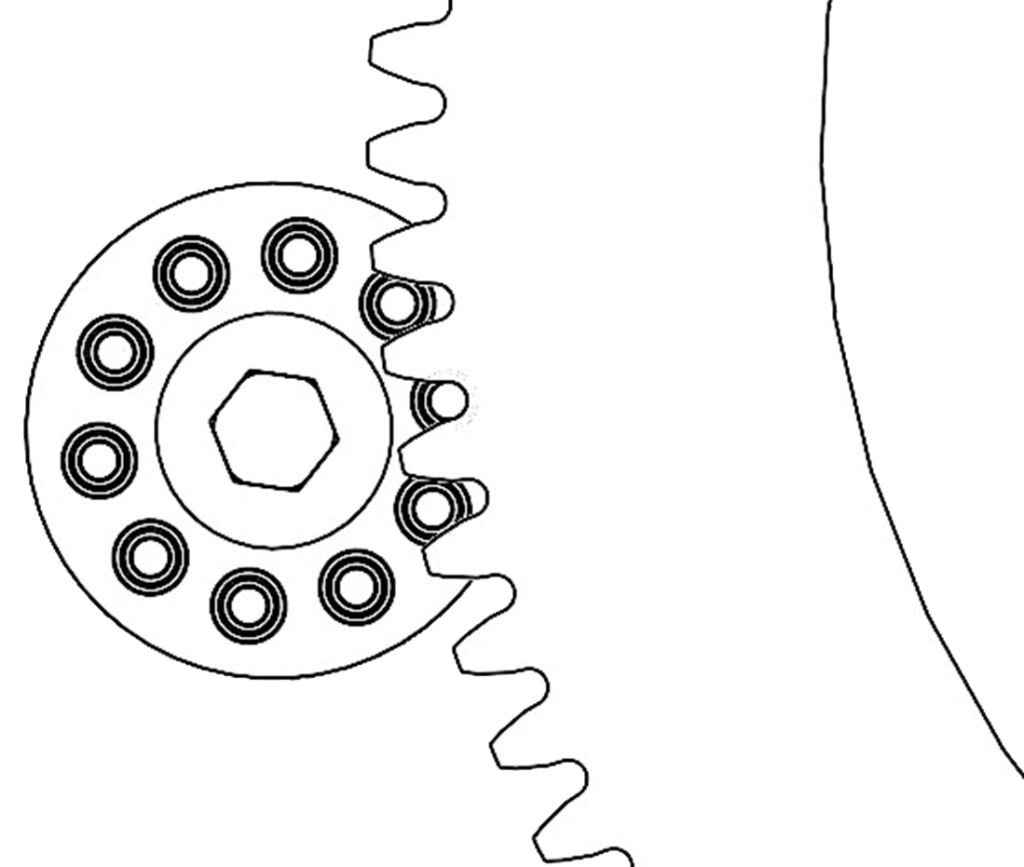
A belt and pulley system transfers the rotation from the gearbox output shaft to the turret pinion. The turret pinion has 10 steel shafts on bearings that mesh with an epicycloid profile of the large turret ring gear. This epicycloid and pinion setup has minimal backlash and friction which allows for precise targeting of the shooter